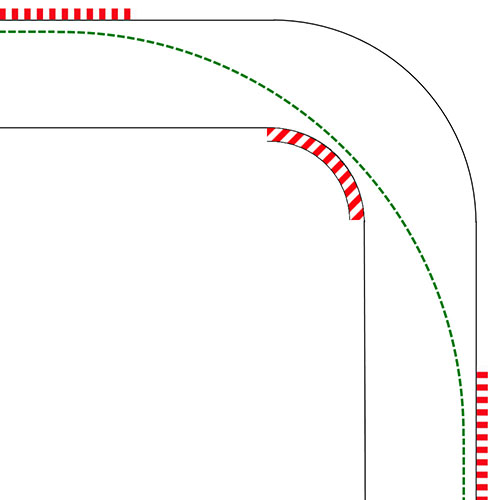
Let’s apply the traction circle from 3.1 to the racing line, and combine it what we learned in 2.4, Driving Basics. Simply put, we want the tyres as close to the limit of grip as possible, and we want to carry the largest possible radius through a corner. See the following illustration.
The maximum speed we can carry through a corner is dictated by the size of the radius of the line taken, and as such, in the above corner, the green line will allow for the highest cornering speed for a given grip level.
Sequences
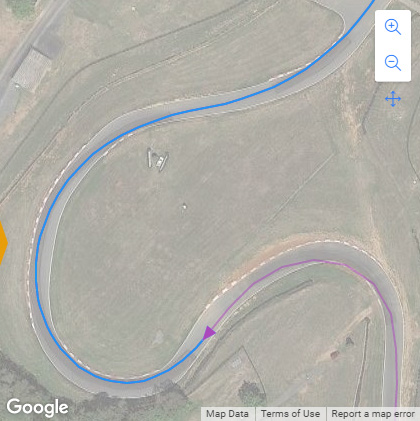
Corners vary greatly in shape and style, and often tracks contain closely connected sequences. A good example are turns five to eight at Summit Point Raceway, where the ideal exit of turn five isn’t at the edge of the circuit because you want a wide entry into turn six, where you tighten up before running wide and bringing the car back in again for turn seven and finally turn eight. Notice how when treated as an interconnected sequence, the ideal line still follows the largest radius possible at all times, whilst being a compromise at an individual corner scale.
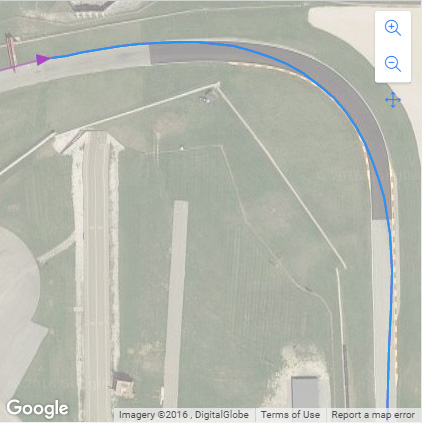
Chicanes are treated in the same way: a combination of two corners with the route of straightest line through both, as seen here at Donington Park National.

Entry vs exit
The ideal line isn’t always symmetric. Driving around a track isn’t a corner-by-corner thing. With each one you should consider what comes before and after. It’s worth, for example, compromising the entrance of a corner for a faster exit if you have a long straight after, as more time can be gained since exit speed is carried for the duration of the straight.
To achieve this, your turn-in point will be later and from a wider position, and therefore the radius of curvature is going to be tighter before returning to a late apex, resulting in a straighter line on exit, allowing for earlier throttle application as a result.
The reverse is also true. If you have a slow corner immediately following the one you’re taking, you can sacrifice the exit for a faster, more direct entry. The slow exit of the corner doesn’t matter, because you’ll spend very little time before the next one which requires a slow apex anyway.
Each corner requires prioritisation between entrance and exit, based on what comes before and after.
Here’s an example. The first corner of the Nürburgring Grand Prix layout has an early apex, where you compromise the exit because a slow corner follows.

A good example of a late apex is the last corner at Road America, where the straight follows. Keep the car wide on the brakes and have a late turn-in. Your minimum speed should be well before the apex. Once you’re there, the car is already accelerating hard, carrying more speed onto the straight.
Other factors
A final thing to note about the optimum racing line is that there are often exceptions caused by track and corner specific characteristics, such as bumps, camber (positive or negative), and curbs. Consider the racing line F1 cars use at Monaco after “Casino”, where they jink to the right then left to avoid the bump which would otherwise unsettle the traction and balance of the car, costing time. The racing line as described above assumes a circuit where grip levels are uniform throughout the racing surface, but when these other factors come into play, it’s worth modifying your line to where the extra grip is provided and vice versa.
Up to you
Analyze your lines carefully, keeping the biggest radius in mind and the sequence of corners and straights. Combine it with the knowledge of the traction circle, for the fastest way through corners.
If you’re struggling, remember you can compare your lines at any time with telemetry from datapacks on the VRS app. Follow it up with reading 3.3, on car control.