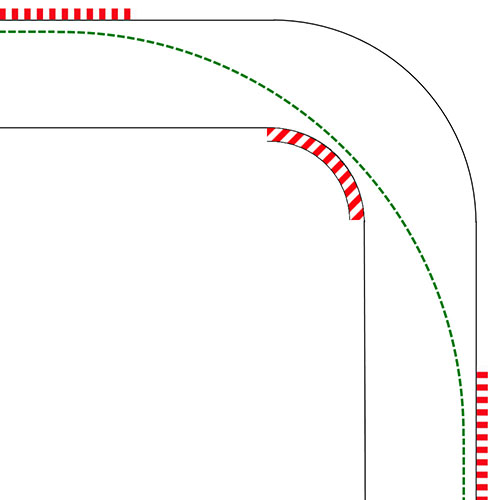
A fundamental skill required to drive around a race track as quickly as possible, along with following the optimal racing line, 3.2, is having the ability to carry the maximum speed on that line. This essentially boils down to one thing: car control.
To have good car control means you are comfortable driving a car on the limit of its grip (and sometimes a little bit over it), where the behaviour of the car is very different to that of driving below this limit.
Below the limit, a car will steer to follow exactly the cornering path and radius to which you demand. Yet driving on the limit presents a much bigger challenge, and is where a competent racing driver operates.
How do we know when we’ve reached the limit of grip?
Two behaviours can occur when we exceed the maximum speed for a particular cornering radius. One of these is known as understeer, the other is known as oversteer.
Understeer
Understeer occurs when the available grip at the front tyres is less than at the rear tyres, and as a result the front of the car begins to push wide of the desired cornering radius when the limit of grip is exceeded.
Oversteer
Oversteer is the opposite and occurs when the available grip at the rear tyres is less than at the front tyres, and as a result the rear of the car begins to slide wide and the whole car rotates in the steered direction more than desired. When left uncorrected, this typically results in a loss of control and a spin.
Typically a car will exhibit very mild understeer or oversteer just below the limit of grip and the maximum possible speed for a given cornering radius. This is usually accompanied with a slight scrubbing sound from the tyres. In a simulator it’s difficult to feel the onset of under or oversteer, but it’s definitely possible to hear how hard you are pushing the tyres, and therefore how close you are to the limit of grip.
If you avoid exceeding the speed which results in these subtle cues from the car and tyres, you will also avoid putting yourself in the situation where you are forced to make a correction for either pushing wide from understeer, or over rotation due to oversteer. However, achieving this without ever exceeding the grip limit is an unrealistic expectation, and as a result it is very important to learn how to make corrections to deal with excessive understeer or oversteer to regain control of the car and bring it back within the limit of grip.
Generally a car will have an inherently built in bias towards either understeer or oversteer, but even a perfectly setup and balanced car can exhibit either characteristic depending on how it is driven.
Correcting for understeer
Understeer is certainly the easiest over-the-limit behaviour to make a correction to. The most effective method is to simply reduce throttle input, and if understeer persists, gently press on the brakes until the car ceases to run wide of the desired cornering line. The most common mistake a driver makes when experiencing understeer is to steer further into the corner. This will never reduce understeer (since you’re already over the limit of grip) and most of the time further reduce the grip at the front tyres, which in turn worsens the understeer.
Correcting for oversteer
Oversteer is significantly more difficult to deal with. If it’s felt or observed early enough, it can be fully corrected by doing the opposite to that which created the oversteer in the first place. For example, oversteer can be caused by using too much throttle in rear wheel driven cars, overwhelming the rear tyres and robbing them of lateral grip. Clearly, reducing throttle input in this situation will help reduce the oversteer.
There are however, other ways in which oversteer can be induced. There’s so called “lift off oversteer” whereby a driver abruptly lifts off the throttle whilst the car is loaded up mid corner, which causes a sudden deceleration due to engine braking and the car experiences a forward weight transfer shift, which adds grip to the front tyres whilst simultaneously reducing it at the rears. This effect can be even more severe if the driver squeezes on the brake pedal. The best method to correct for this is to quickly reapply some maintenance throttle to shift the weight transfer back to its original balance.
Opposite lock or countersteer
Generally, when oversteer occurs, it very quickly escalates beyond the point at which the above methods offer an effective correction, and a further measure is required.
This is known as countersteering, but also goes by the name of opposite lock, or steering into the slide. It is the act of steering in the opposite direction to that which the car is rotating.
Common mistakes
One of the most typical situations experienced by drivers who attempt to countersteer when presented with oversteer is overcorrecting. This happens when the correct amount of steering input is applied to begin to reverse the rotation of the car, but the driver is too late at straightening the steering wheel and as a result the car continues to rotate beyond the desired direction and continues into a “spin”.
Snap oversteer is another problem inexperienced drivers tend to suffer with, and is characterised by a sudden transition from understeer to oversteer. Typically when the car is understeering, the driver makes the mistake of applying more steering lock, further reducing the front grip. In this situation if the car loses rear grip (which could be caused by an abrupt throttle change, braking or a change in track surface), the car may begin to transition to oversteer whilst the driver maintains steering input. At this stage, if the driver attempts to countersteer, he/she must first unwind the extra steering lock which momentarily results in even more front grip before they can countersteer. Unsurprisingly, this almost always results in a terminal spin before the driver can react properly.
Drifting – sustained oversteer
Oversteer can be deliberately sustained in many cars, and the act of doing so is known as drifting. Drifting involves intentionally provoking oversteer, and then modulating the throttle and steering corrections in a way which prevents the car from spinning out of control but doesn’t fully arrest the slide. It can be a very helpful technique to learn, as it forces you to very quickly learn excellent car control which can help balancing the car on the limit of grip and saving potential spins and / or crashes. Of course we don’t recommend intentional drifting as a means for driving fast!
Balance
The ultimate goal here is a word you hear often in top level motor racing circles such as Formula 1, and that is balance. When the car has good balance, it means that you’re equally likely to experience either under or oversteer above the limit, resulting in the most neutral cornering behaviour which is usually the most efficient – and the fastest.
Up to you
We recommend taking the MX-5 out to the centripetal circuit within iRacing and having a play with the car at and over the limit, much in the same way as the demo videos in this article. We’re sure it will help you handle the car better at the limit and improve your overall car control. Aim to sense early cues for under and oversteer, both visually and aurally through tyre noise to recognise when they are nearing their limit of grip. Then apply that to the racetrack!


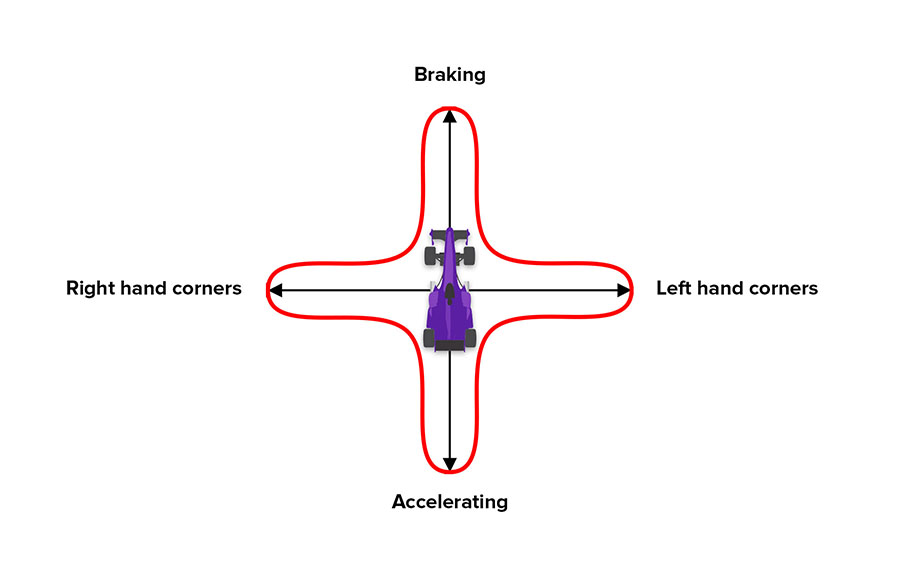
 Welcome to season two of the VRS Academy — let’s dive into racing on a more technical level. We’ll start off with the traction circle, which is a key element used to understand the grip available from the tyres.
Welcome to season two of the VRS Academy — let’s dive into racing on a more technical level. We’ll start off with the traction circle, which is a key element used to understand the grip available from the tyres.
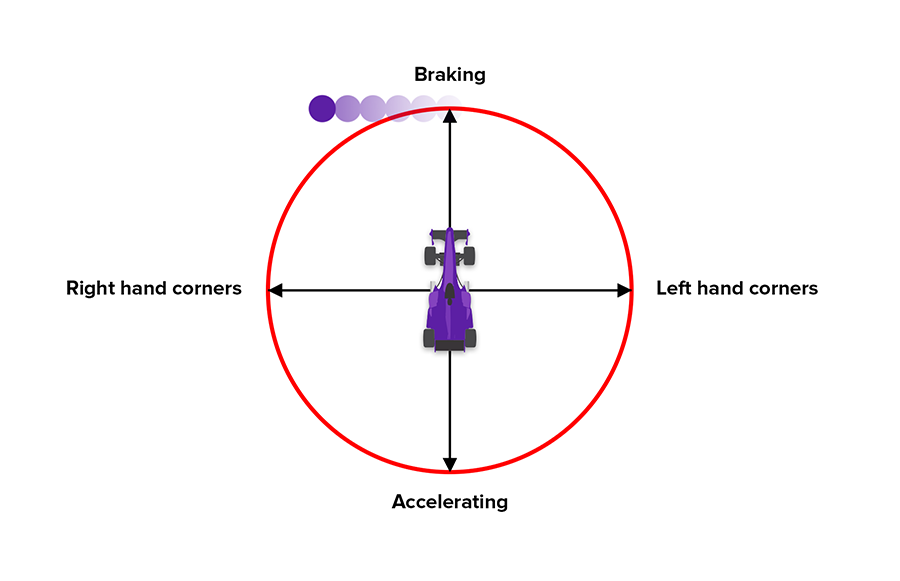
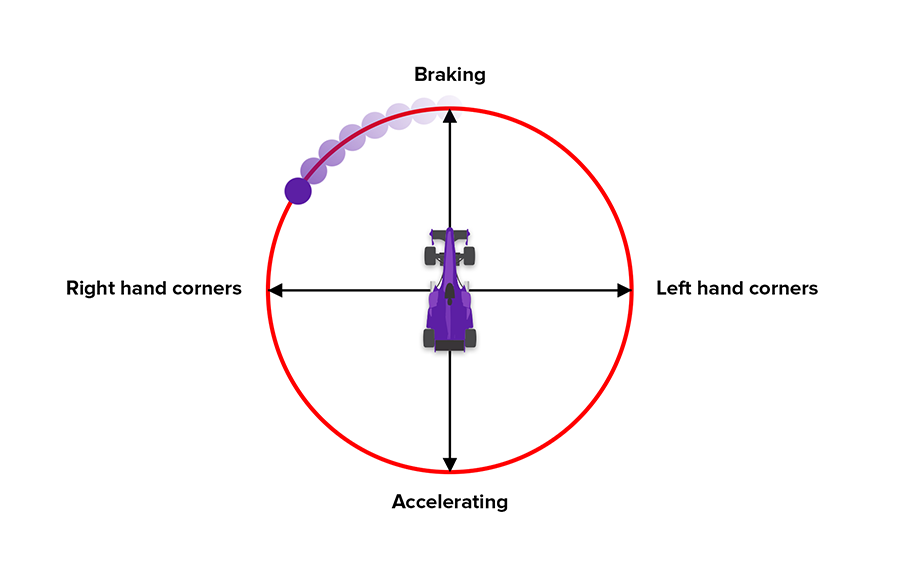


 The optimal lap is easy to describe, but difficult to achieve. It’s a combination of two basic things: utilising the full grip of the tyres through the perfect line. In other words: optimal racing line & optimal speed.
The optimal lap is easy to describe, but difficult to achieve. It’s a combination of two basic things: utilising the full grip of the tyres through the perfect line. In other words: optimal racing line & optimal speed.
